HOME
THE PIRATE CINEMA
HTML
THE CREATIVE CODING START
CSS&HTML
ARE WE ALL ADDICTS NOW?
PURE DATA
READINGS
P5 BASICS &
READING REFLECTION W9
P5.js & ANIMATED THROBBER+READING W10
SKETCH (FEEDBACK AND LOOP) + READING W11
W12 SIMPLE PROGRAMME &'LOOP' M.FULLER.
CODE & GENERATIVITY
"The Aesthetics of Generative Code"
CODE & OBJECTS
"Randomness"
CODE & ALGORITHMS
with p5.js
CODE & DATAFICATION
+reading
Cybernetics and the Pioneers of Computer Art
Thomas Dreher
Computer and Art
Cybernetics and computer technology merged firstly during the Second World War.
In 1948 Norbert Wiener published a book called “Cybernetics Or Control And Communication In The Animal And The Machine”. This is when the term “cybernetics was established.
Wiener related his work to Gottfried Wilhelm Leibniz (his predecessor). Leibniz made the procedure of enhancing thought processes by technical means possible.
During the 50s and 60s there were two types of computer artists who were the first to explore the grounds of cybernetic methods. There were the ones who tried to develop cybernetics (e.g. Gordon Pask) and the ones influenced by it (e.g. Nicolas Schöffer, Georg Nees, Herbert Werner Franke and Frieder Nake).
The Evolution of the Cybernetic Foundations during the Second World War
The American research for anti-aircraft technology (for fire control systems) became the motivator for cybernetics. This was due to Wiener’s and Shannon’s research shown in their books: “Cybernetics Or Control And Communication In The Animal And The Machine” (Norbert Wiener) & “A Mathematical Theory of Communication” (Claude Elwood Shannon). Computing was also used for cryptography.
Ballistics- the scientific study of the effects of being fired
The Anti-Aircraft System- it receives input (of the moving target) and produces output (the bullet to the target). Through the probability theory the system determines possible movements of the target. There was also information for “negative feedback” which prohibited an output (firing)
Norbert Wiener divided the motion of a flying obj. into time phases. This made it easier to predict the path of the enemy aircraft. It “allowed recognizing the repetitions and modifications between the phases”
Julian Bigelow and Paul Mooney made the “antiaircraft predictor”, which was using Wiener’s theory of probability and statistics in order to analyze the relations between time phases whilst using “measurable transition probabilities”
The “theoretical model” takes the pilot and the gun pointer as elements of one system. This establishes a point without differences between humans and machines.
During the WW2 airplanes became faster, and the predictions became more difficult. After continuous research the “Nike- Ajax”, “a system for constant correction of the gun flight path” was created.
Cybernetic Models
“material models” – the tracking of targets by anti-aircraft systems become civilian tasks. It is also what provided the relationships expressed of a “theoretical model” with constructed demonstration material. This “theoretical model” is what points to the relations between the elements used in the “material model” and also relations in different systems with different elements.
William Ross Ashby made a model of his theoretical “homeostasis” (the tendency towards a relatively stable equilibrium between interdependent elements, especially as maintained by physiological processes (Google Dictionary))
The “Homeostat” (quadripartite technical system) showed Ashby’s “law of requisite variety” in action.
In 1950 Claude Elwood Shannon made a “Maze Solving Machine” which had a “sensing finger” which memorizes paths already passed and returns to them after it reaches a “blind alley” = a path search with a machine’s memory
In 1953 William Grey Walter (cybernetician) wrote a book called “The Living Brain”, he compared robots “ electrical oscillation at low frequency” to a humans measurements of brain waves. This allowed him to know if an event was forgotten or memorized.
Self-navigating robots (as material models) = brain activities
Cybernetic Sculptures
In 1955 Schöffer Gordon Pask created “learning machines”. One of them called “ Eucrates” which consisted of 3 sculptures – teacher simulator, control console and a pupil simulator.
Between 1953-1957 Gordon Pask and Robin McKinnon-Wood developed a reactive system called “Musicolour”. It enabled the musician to control the audio-visual relations of shows from his audio input. An analog computer was used, it was made up of sound filters, memory units and elements processing the audio input.
In 1956 Nicolas Schöffer made “CYSP 1” (a mobile kinetic structure)
CYSP 1- it moves on rubber wheels, searches path with self-navigation, aluminium disks rotate on a steel frame, photoelectric cells and a microphone installed as sensors.
“Homeostat” and “CYSP 1” have in common a random generator and a limited capability to adapt to environmental conditions.
CYSP 1 is considered an early example of Op Art in a kinetic variant.
However for Abraham André Moles, Op Art was a research for aesthetic purposes.
Gordon Pasks made a installation “Colloquy of Mobiles” (1968). It was a triangular panel with obtuse (more than 90/less than 180 degrees) angle corners hanging from the ceiling and 3 organic rotating fiberglass objects and 2 inorganic mobiles hanging from the triangular panel. Inorganic being the “MALES” and the organic “FEMALES”
CYBERNETICS & THE PIONEERS OF COMPUTER ART
THOMAS DREHER
NODE.JS/APIs & Obfuscation, Weird Languages, and Code Aesthetics
JPEG GLITCHES WITH ANTONIO ROBERTS
NODE. JS/APIs & Wendy Hui Kyong Chun. "The Enduring Ephemeral, or the Future Is a Memory."
INITIAL SKETCH (final project)
+ Big Data Aesthetics
SOME CHANGES in(final project)
BIG DATA ART
FINAL "ADDICTION TO DATA" PROJECT
& some aesthetics explained
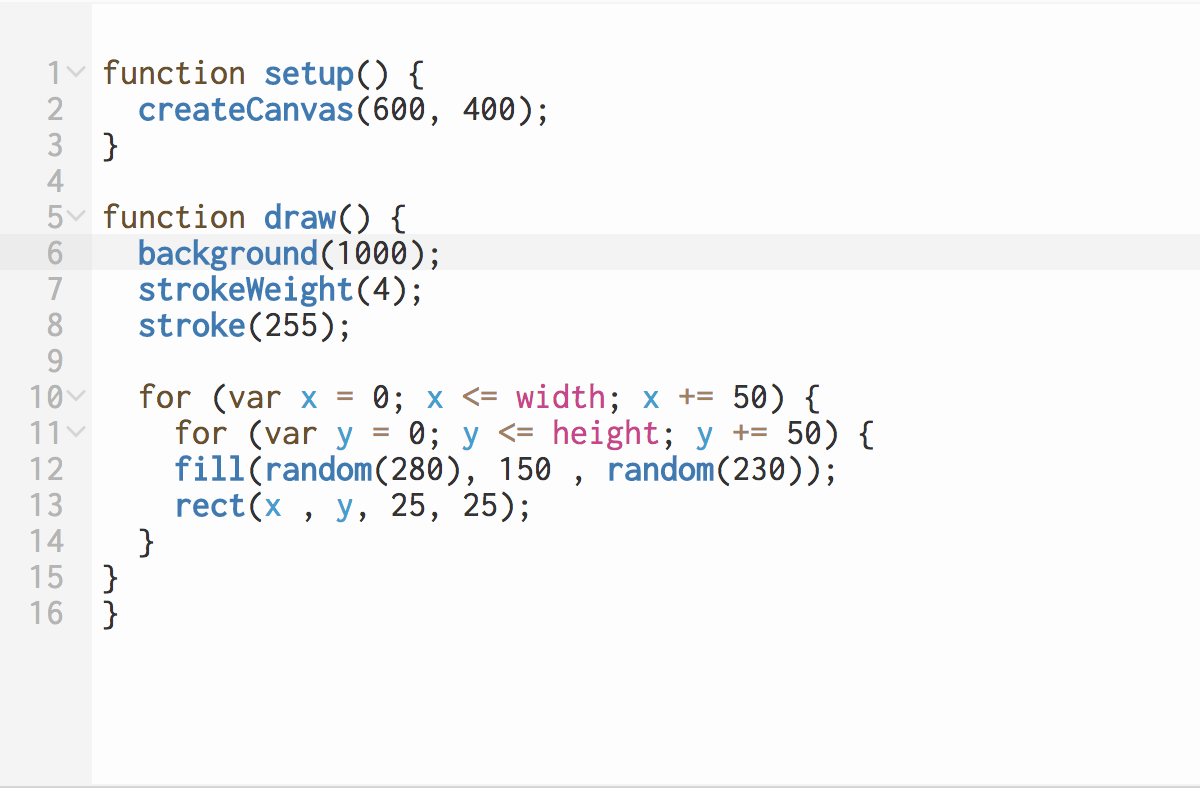
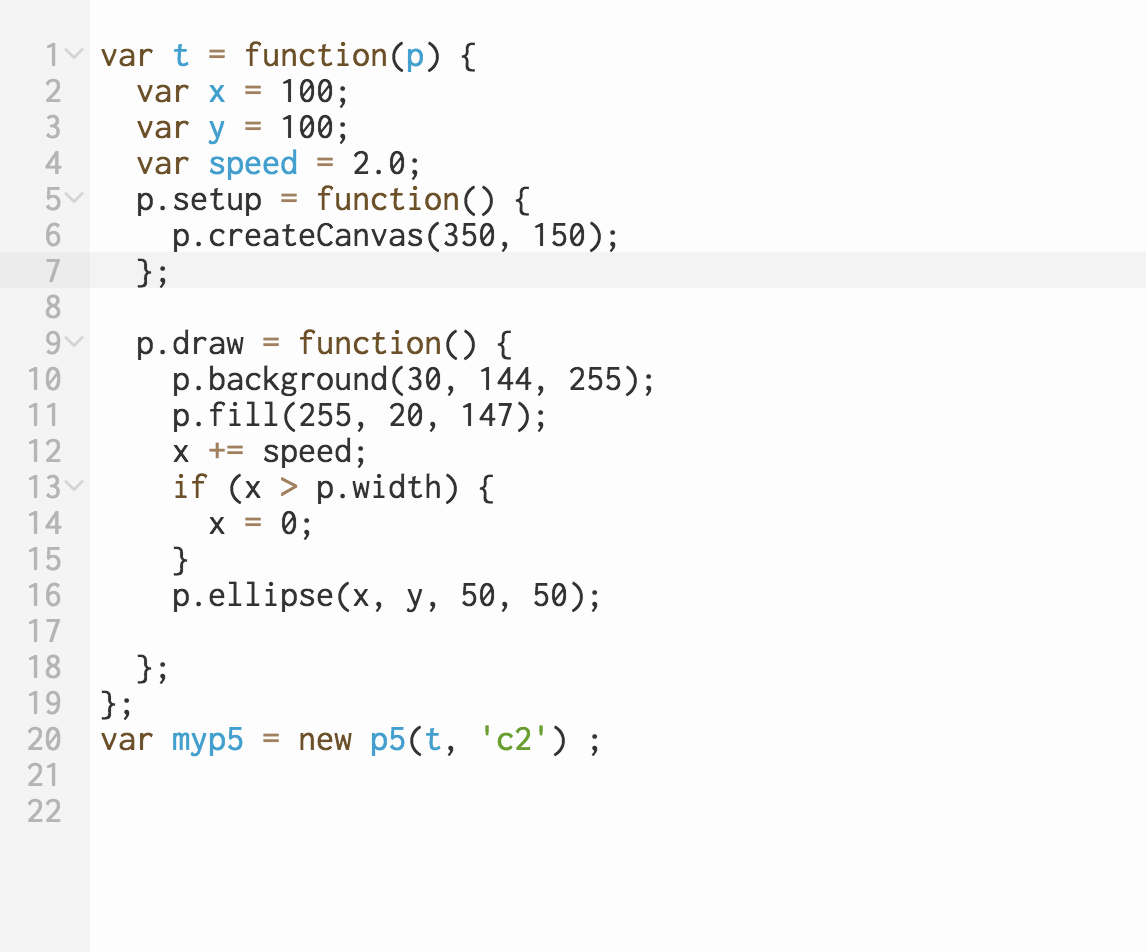
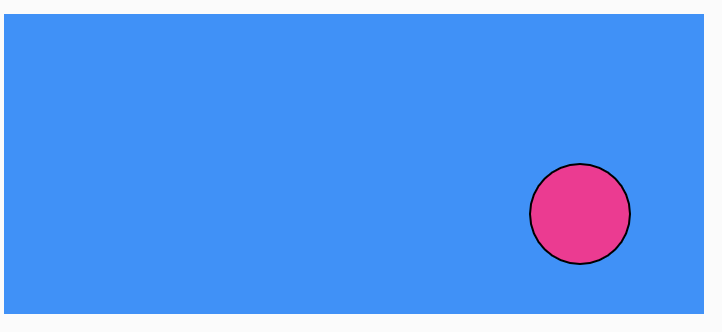
I read somewhere that a good example of feedback could be seen in the activity of playing tennis with a "smart" machine...When the smart machine reads feedback, it could detect if the player was able to return the ball in a specific time frame. Then each time the machine throws a tennis ball, it checks if the player was able to return it. If they have managed, the machine will continue at the same pace, but if they haven't, it would have to slow down. So in my case the feedback is where the local variable 'x' is seen as less or equal to the width of the canvas when the programme I am creating check for how long the screen is in order to stop the rectangles there. The pink ellipse example is showing a loop too and there is variables x and y too, however unlike the rectangles sketch, the ellipse one has use the movement across the 'x' axis in being greater than the width in which case the ellipse does not stop where the width of the canvas stops, but transfers onto the other side and continues its movement in the loop.

BRAINSTORMING FOR FINAL PROJECT